机械模组转移方案 隧道炉至传送带的高效对接设计
在机械设计与制造领域,实现隧道炉中烘烤好的模组(尺寸:长210mm、宽115mm、高100mm)平稳转移到传送带上是一个常见但关键的电气控制与机械结构集成问题。针对您的需求,结合电气交流版块的专业经验,我提出以下解决方案,供您参考。
方案概述
本方案采用机械臂与传送带协同工作的方式,通过电气控制系统实现自动化转移。核心在于确保模组在转移过程中保持稳定,避免因高温或振动导致损坏。
详细设计
- 机械结构部分:
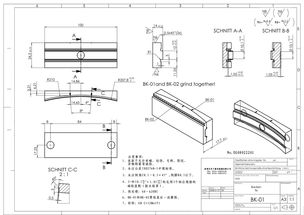
- 在隧道炉出口与传送带入口之间安装一台多关节机械臂,臂端配备耐高温夹具(如气动夹爪或真空吸盘),以适应模组尺寸(210mm×115mm×100mm)。夹具需定制,确保抓取力均匀,避免模组表面划伤。
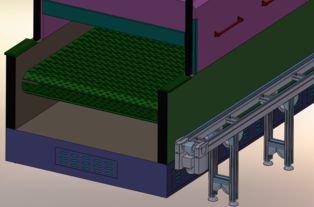
- 传送带采用耐热材料(如不锈钢网带),宽度略大于模组宽度(建议130mm),并设置缓冲区域,以减缓模组着陆时的冲击。
- 电气控制部分:
- 使用PLC(可编程逻辑控制器)作为核心控制器,集成传感器系统:在隧道炉出口安装红外传感器,检测模组到位信号;在传送带入口设置光电传感器,确认转移路径无障碍。
- 机械臂由伺服电机驱动,通过PLC编程实现精确运动轨迹:从隧道炉抓取模组后,沿预设路径平移至传送带上方,缓慢释放模组。电气线路需屏蔽高温干扰,确保信号稳定。
- 安全与效率优化:
- 添加紧急停止按钮和故障报警系统,如机械臂超限或传送带堵塞时自动停机。
- 通过模拟软件(如SolidWorks或AutoCAD)进行运动仿真,优化转移周期,建议转移时间控制在3-5秒内,以匹配生产线节奏。
实施建议
- 优先测试夹具的兼容性,可先用原型模组进行空载调试。
- 电气部件选择IP54以上防护等级,以适应工业环境。若预算允许,可引入机器视觉系统,辅助定位模组方向。
此方案结合了机械设计与电气自动化,能高效解决模组转移问题,同时降低人工干预风险。如果您有更多细节需求(如隧道炉和传送带的具体间距),可进一步调整设计。希望这些建议能助您一臂之力!
如若转载,请注明出处:http://www.diyapeidian.com/product/889.html
更新时间:2025-10-24 10:01:17